Neste artigo trazemos um resumo da abordagem do DNS – Dynamic Neuromuscular Stabilization, quais são os pilares sobre o qual se baseia, elaborando alguns de seus princípios.
A ideia do artigo nasceu como sendo um resumo do curso clínico (como mostra a introdução), após muito tempo percebi que ele acabou ficando mais abrangente o que me levou a trocar até mesmo o título.
O que é DNS – Dynamic Neuromuscular Stabilization – Parte 1
Marcus Lima
Recentemente tive a oportunidade de participar do meu primeiro curso clínico do DNS (Dynamic Neuromuscular Stabilization – Estabilização Neuromuscular Dinâmica em uma tradução livre), ministrado pelo quiroprata americano David Juehring.
Já havia participado da série DNS Exercício algumas vezes, e resolvi escrever uma revisão de alguns pontos importantes passados no curso clínico, bem como uma visão geral do que se trata o DNS, em benefício daqueles que ainda não conhecem a filosofia e raciocínio por trás do que muitos chamariam de “método”, mas que na verdade é um conjunto de princípios que podem ser aplicados em qualquer contexto, seja no treinamento, seja na reabilitação.
O princípio mestre que guia essa abordagem é a Cinesiologia Desenvolvimental, os aspectos neurofisiológicos do amadurecimento do sistema postural e locomotor. A abordagem do DNS usa esses aspectos ao comparar os padrões de estabilização de um adulto com os de uma criança saudável, usando essas comparações na avaliação e tratamento (Kobesova et. al, 2015).
Antes de mais nada, vejamos 2 princípios fundamentais sobre os quais se assenta o DNS.
Cinesiologia Desenvolvimental
Um resumo em 1 frase seria:
A sequência de desenvolvimento motor pela qual todos nós passamos, ou deveríamos passar, nos primeiros e fundamentais meses de vida.
Elaborando um pouco mais, se parte do princípio que, de modo ideal, deveríamos passar por uma sequência de fases (posturas espontâneas) consideradas, cada uma delas, marcos do nosso processo de amadurecimento motor.
Da mesma forma, são marcos do amadurecimento do sistema nervoso central. Dentro dessa ideia, essa sequência de posturas espontâneas é geneticamente determinada, mas também em certa medida depende do grau de controle do Sistema Nervoso Central (de sua maturação, se por exemplo a criança é mal nutrida isso interfere no amadurecimento do SNC) e de fatores ambientais (se os pais são medrosos e impedem a criança de explorar o espaço por exemplo ou colocam o bebê em um andador, algo comum anos atrás e que nos dias de hoje vem perdendo espaço, não sendo recomendada sua utilização).

No DNS, se usam estas posições/posturas para avaliar, tratar e no meu caso, como professor de educação física, para avaliar e propor exercícios que auxiliem os alunos a corrigirem disfunções que podem estar relacionados às dores e dificuldades que enfrentam.
Como o diabo está nos detalhes, vejamos com mais calma algumas dessas fases chave.
Recém-nascido (cerca de 6 semanas de vida): Imaturo

Imaturidade do sistema nervoso central, reflexos primitivos presentes (movimentos que não estão sob o comando voluntário, sendo controlados pela medula espinhal e o tronco cerebral), imaturidade morfológica em virtude da imaturidade do sistema nervoso central e de não ter sido exposto às cargas da gravidade como a conhecemos. Movimenta-se em bloco, ainda não existe a dissociação entre o tronco e os membros.
Posições:
→ Coluna cervical reclinada (extensão das vértebras cervicais superiores) e em leve flexão lateral.
→ Sem dissociação entre o movimento dos olhos e da cabeça, se movem juntos.
→ Glenoumeral em rotação interna e extensão, braços aduzidos junto ao tronco.
→ Escápulas em protração (ou seja, projetadas à frente) e elevação.
→ Cotovelos em flexão máxima, antebraço em pronação, punhos em desvio ulnar, dedos flexionados, inicialmente o polegar fica dentro do punho cerrado, um pouco mais adiante na maturação, o polegar fica fora do punho cerrado (sinal de amadurecimento). Os braços se movimentam no plano frontal e não cruzam a linha média do corpo.
→ Existe cifose na coluna lombar, toda coluna está em uma posição cifótica, devido ao posicionamento do feto no útero materno (encolhido em forma de bola).

→ Pelve em anteversão (inclinação anterior), abdução do quadril de cerca de 90° (cada quadril abduzido em aproximadamente 45°). Quadris e joelhos flexionados.
3 meses: Estabilização Sagital

O bebê atinge o primeiro e fundamental marco motor: A estabilidade do tronco no plano sagital.
Posições:
→ Dissociação entre o movimento da cabeça e movimento dos olhos. Existe movimento livre da cabeça, o bebê já é capaz de sustenta-la quando está em base pronada (de barriga para baixo).
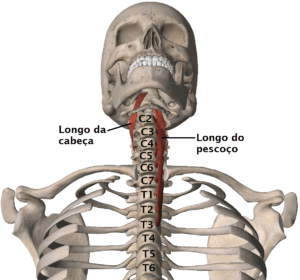
→ Coluna cervical não está mais em uma posição reclinada (extensão dos segmentos cervicais superiores), existe um equilíbrio entre os flexores profundos do pescoço e os extensores cervicais (flexores se inserem até T3 e extensores até T6).
→ Eixo axial da coluna está “alongado”.
→ Desenvolve a co-ativação entre os músculos abdominais, diafragma, assoalho pélvico e extensores da coluna. Todos trabalhando de maneira eficiente para fornecer estabilidade no plano sagital. Essa sinergia é crucial na estabilização do tronco e será vista em mais detalhes mais adiante.
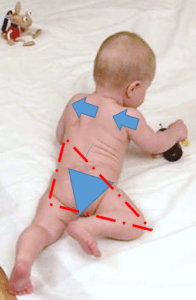
→ Desenvolve a ativação dos estabilizadores das escápulas. Rombóides puxam em direção à escápula quando o bebê está de barriga para baixo, na mesma posição ainda, o serrátil anterior levanta o tronco em direção às escápulas, bíceps e tríceps trabalham juntos direcionando a escápula nessa base pronada (barriga para baixo – posição do bebê da foto acima).
→ Desenvolve a rotação externa da articulação glenoumeral.
→ Usa os cotovelos como base de suporte em posição pronada, especificamente os epicôndilos mediais do úmero (estabelece uma base simétrica de suporte: Os 2 epicôndilos mediais do úmero e a sínfise púbica).
→ Bebê começa a se distanciar do solo, já levanta um pouco a parte superior do tronco, esse é o início de uma jornada de mais de 10 meses até que a criança comece a caminhar (por volta dos 13 meses).
→ Pelve já alcança uma posição neutra e consegue sustentar as pernas fora do solo.
4,5 – 5 meses: Diferenciação dos membros
Diferenciação dos membros é o marco motor fundamental nessa idade, a criança não se move mais em bloco, agora usa os membros como suporte e com a função de agarrar objetos. Aos 3 meses o suporte era simétrico, sobre os 2 cotovelos, agora passa a ser assimétrico, um cotovelo é usado como suporte enquanto o outro braço está livre para exploração do ambiente.
Posições:
→ Inicia movimentos no plano frontal, já é capaz de agarrar objetos lateralmente, ou seja, objetos posicionados ao lado do corpo.
→ Começa a usar membros inferiores como suporte, um de cada vez, desenvolvendo um padrão cruzado, típico da locomoção humana. Um cotovelo é usado como suporte em conjunto com o joelho do lado oposto, enquanto uma mão fica livre para agarrar objetos.

→ Pelve em posição neutra no plano sagital e oblíqua no plano frontal, inclinação lateral da pelve, em virtude de estar usando o joelho como base de suporte.
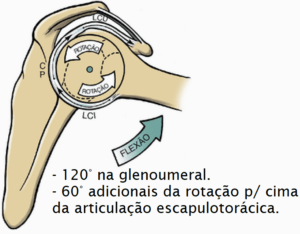
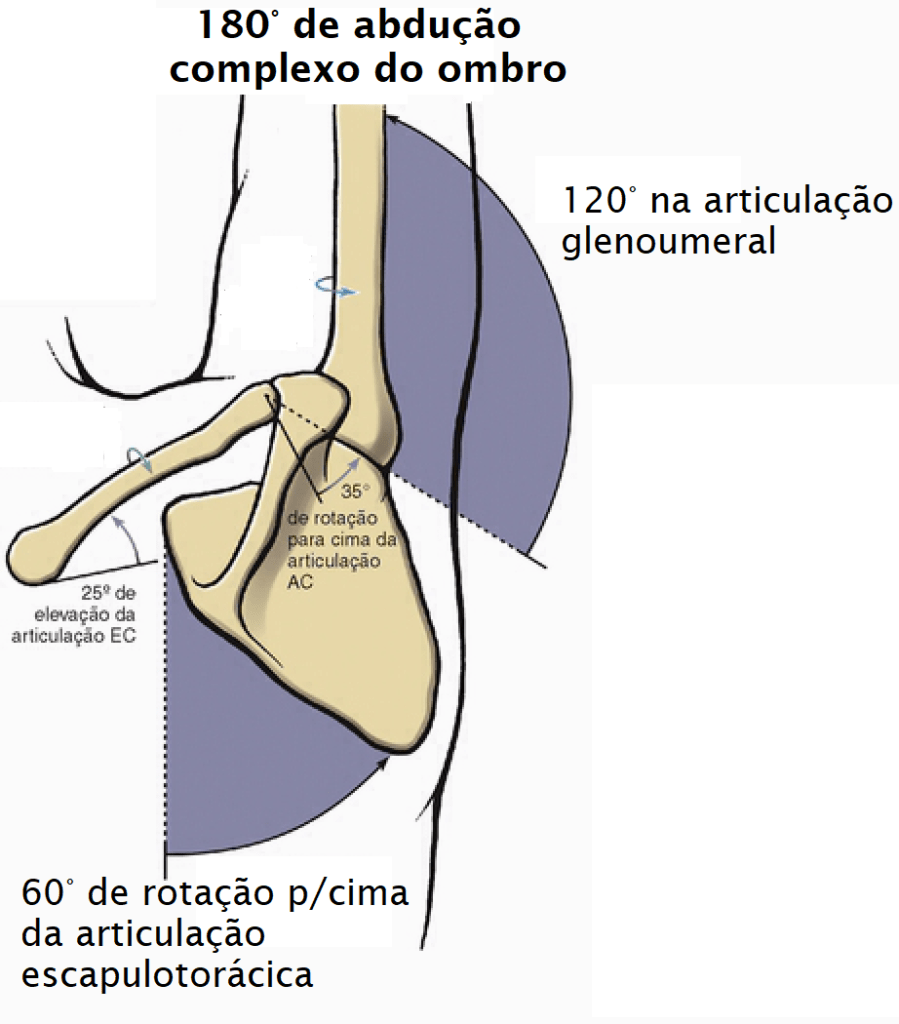
→ Quando o bebê está em base pronada consegue levantar objetos até 30° acima da superfície. A articulação glenoumeral já flexiona entre 90-120° (em comparação, o mínimo de flexão na glenoumeral do adulto é de 120°, a flexão até quase 180° é acompanhada por uma rotação superior da articulação escapulotorácica, Neumann, 2011) e abduz 60° (em comparação com aproximadamente 120° do adulto, Neumann, 2011).
6 meses: Suporte quadrangular
Primeira vez que consegue usar os 2 membros inferiores como suporte ao mesmo tempo.
Posições:
→ Se distancia ainda mais do solo, usa as palmas das mãos como suporte, mas para que isso aconteça os reflexos do nascimento, especificamente o reflexo palmar, aquele em que o bebê agarra instintivamente qualquer coisa que encoste na palma de sua mão, deve ter desaparecido. Ainda não consegue tirar uma das mãos do solo, usa ambas como apoio nessa posição.
→ Suporte quadrangular, sobre as palmas das mãos e os joelhos, mas ainda sem locomoção para frente.
→ Respiração costal se manifesta plenamente, consegue direcionar a respiração para a parte de trás do cilindro abdominal.
→ A junção toracolombar é estável, fundamental para as funções de respiração, defecação e para a fala.
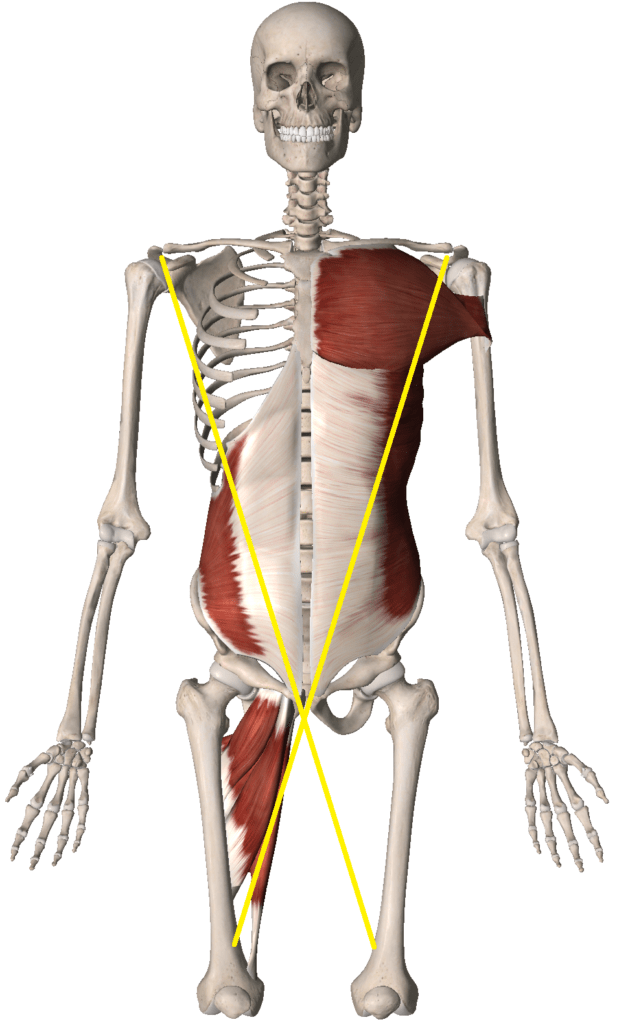
→ Desenvolvimento da “cadeia muscular abdominal oblíqua anterior”: A função de colaboração entre o oblíquo externo do abdome e o oblíquo interno do abdome contralateral, podemos expandir essa cadeia para os músculos peitorais e adutores. Essa cadeia formará um X na frente do corpo, auxiliando no controle dos movimentos rotacionais (a figura abaixo mostra uma “perna” do X).
→ O bebê consegue fazer o rolamento completo, que iniciou por volta dos 5 meses, essa é a primeira forma de locomoção da criança, ela é atraída por qualquer coisa que chame sua atenção e rola para poder alcançar.

Abaixo um vídeo em que o Instrutor Dave Juehring mostra uma progressão de posturas espontâneas na base supinada, desde as 6 semanas até os 6 meses de vida.
Centramento Articular
O conceito de centramento articular assume que as estruturas estão posicionadas no lugar certo e deslizam de maneira coordenada.
Uma articulação centrada se movimenta dentro do seu eixo da maneira mais eficiente e, em tese, todo sistema musculoesquelético deveria se comportar dessa maneira no momento em que realiza movimento, seja ele complexo como em um salto acrobático ou simples como levantar um braço para alcançar algo em uma prateleira.

Se ocorrer dessa forma, ao nos movimentarmos as articulações terão o máximo contato ósseo possível, ficando muito mais fácil e eficiente dissipar as cargas que sofremos, da gravidade (todo o tempo, desde o nascimento até à morte) ou de objetos externos, se for o caso.
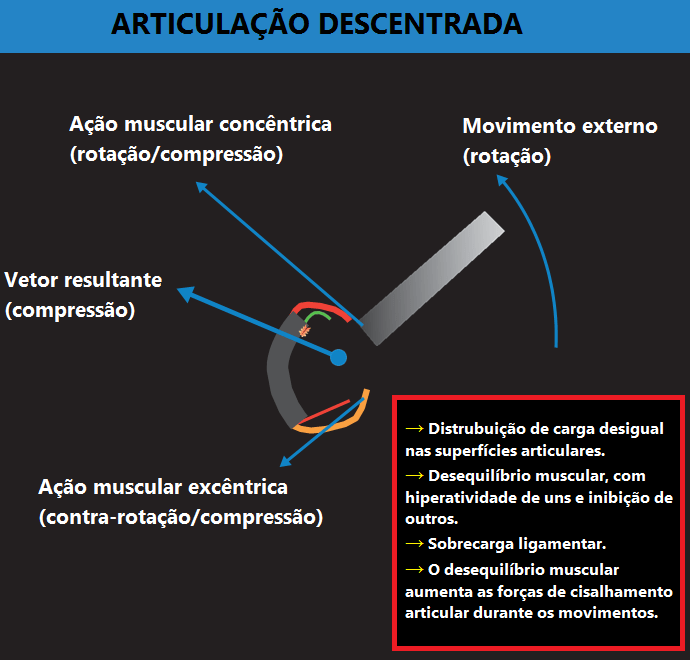
As figuras abaixo, adaptadas de Ulm et al. 2016 ilustram bem o processo.
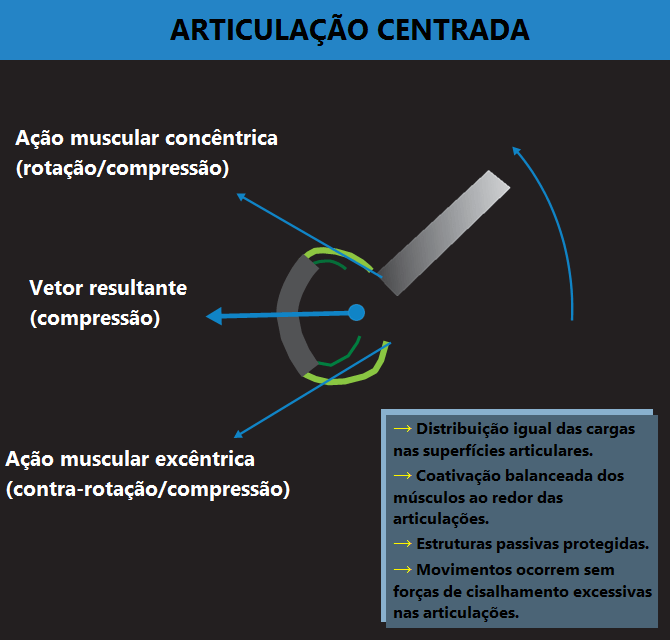
Outras palavras usadas para descrever o mesmo conceito seriam “Articulação em posição Neutra”. Essa posição só irá ocorrer quando os músculos que suportam a articulação trabalham de forma que ela tenha a melhor congruência (deslizamento), isso possibilita a maior vantagem mecânica através de toda amplitude de movimento, assim, podemos produzir força muscular em variadas intensidades, dependendo da tarefa.
Ainda, se tudo isso ocorre, o estresse mecânico é menor em estruturas passivas, como: ligamentos, cartilagem articular, tendões, etc. e, em tese, o risco de lesões por sobrecarga é reduzido.
Podemos ver pelas duas figuras acima (adaptadas de Ulm et. al, 2016) que no primeiro exemplo as forças musculares que controlam o movimento articular estão equilibradas (representadas pelas setas azuis), já no segundo exemplo, há um desequilíbrio (representado por uma seta maior do que a outra) fazendo com que um lado “puxe” mais do que o outro, tirando a articulação de seu centramento (ou de sua posição neutra).
Sob condições normais, se o sistema nervoso central (SNC) está maduro, as articulações estão na melhor posição para sustentar carga (maior possibilidade de estabilidade em qualquer ângulo) e estão na condição mais favorável para movimento adicional.
A estabilização articular necessita de uma coordenação muscular perfeita. Isso só é possível se o SNC funcionar normalmente. Em uma posição centrada, cargas estáticas são melhor toleradas, dependendo das estruturas anatômicas que estão envolvidas. Os princípios que controlam a postura determinam a formação de estruturas anatômicas e são a expressão de programas controlados centralmente.
A figura abaixo ilustra como o amadurecimento do sistema nervoso central, o sistema miofascial e o sistema articular operam em conjunto e de como são interdependentes.
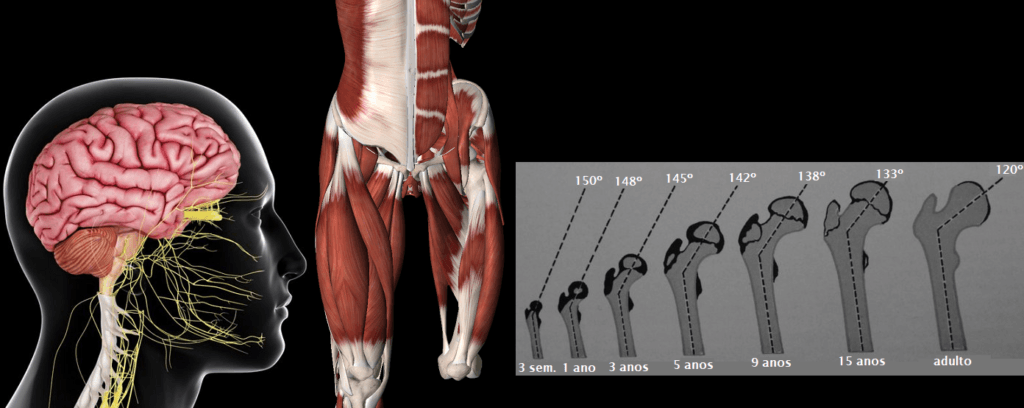
Programa → Função → Maturação Estrutural
SNC → Músculos → Osso (articulação)
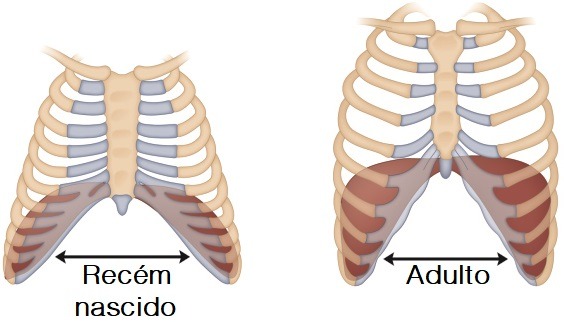
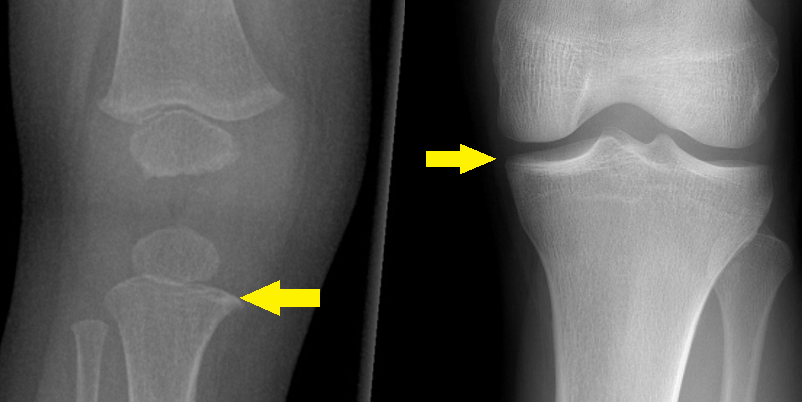
Portanto, o comportamento motor tem uma forte influência sobre o amadurecimento das estruturas osteoarticulares, ex: Diferenças no formato da caixa torácica (imagem acima), ângulos posteriores das costelas (mais voltados para frente no recém nascido para gradualmente se deslocarem para trás), o platô tibial é oblíquo no recém nascido e a medida em que vai recebendo a carga da gravidade vai se tornando mais horizontal e assim por diante.
A maturação do sistema nervoso central faz com que se desenvolvam os programas motores, esses irão comandar os músculos (as sinergias entre eles), que por sua vez irão comandar as estruturas articulares, ajudando assim a moldá-las, não esquecendo que as forças a que estamos submetidos (gravidade, atrito) têm um papel dominante no formato de nosso sistema esquelético.
Os sistemas nervoso central – muscular – esquelético amadurecem para lidar com essas forças a que estamos submetidos. O desenvolvimento biomecânico e neurofisiológico é uma unidade, não podem ser separados.
Cada posição articular depende da coordenação e da função de estabilização dos músculos, e, como já vimos, a coordenação e função são reguladas pelo sistema nervoso central, a qualidade desta coordenação e função irá influenciar não apenas no local, mas de maneira global, um exemplo retirado de Sahrmann, 2001 mostra como isso interfere na função do adulto:
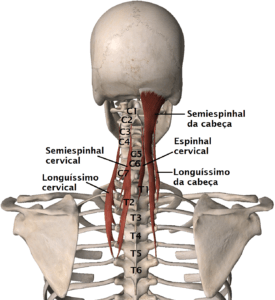
A mudança na ação do esternocleidomastóideo é um exemplo, de flexor da coluna cervical (quando os flexores profundos fazem seu trabalho) para extensor da coluna cervical (quando estes flexores intrínsecos não estão funcionando adequadamente), essa é uma amostra de como mudanças no alinhamento afetam a função muscular.
Conclusão
A abordagem de tratamento enfatiza o treinamento de padrões posturais/locomotores naturais, da forma como foram definidos pela abordagem da cinesiologia desenvolvimental. O cérebro precisa ser estimulado de maneira apropriada e treinado para ativar automaticamente padrões de movimento que são necessários para a coativação dos estabilizadores. Isso pode ser alcançado pela ativação desses estabilizadores ao colocar o indivíduo em posições desenvolvimentais (Kobesova et. al, 2015).
Portanto, o DNS tem como princípio guia a Cinesiologia Desenvolvimental, ou em outras palavras, a sequência de posturas espontâneas pelas quais vamos passando ao longo dos primeiros 13 ou 14 meses de desenvolvimento motor (principalmente). Esta sequência está sob o controle subcortical, não é consciente e está programada para ocorrer, desde que seja em condições normais. Essas posturas espontâneas são usadas para avaliar e tratar, propor exercícios, etc.
Vimos que o conceito de centramento articular nos diz que as articulações devem estar no seu posicionamento ideal, para que possam se movimentar com o máximo contato ósseo possível e dessa forma dissipar as cargas que sofremos da maneira mais eficiente a fim de proteger as estruturas passivas (tendões, ligamentos, cartilagem articular).
Dentro do conceito do DNS, o centramento articular é dependente da mecânica de estabilização do tronco e do papel desempenhado pelo diafragma nesse processo.
Na parte 2 veremos mais alguns conceitos fundamentais e exemplos de aplicações práticas.
Confira a parte 2: O que é o DNS – Parte 2.
Quer saber mais sobre o assunto? Confira a palestra “DNS no Dia à Dia”


Bibliografia
Chisholm, C., Mak, D., Thyagarajan, M. Paediatric Knee Radiographs: Normal Appearances of the Knee Joint in the Growing Patient. Poster Presentation, European Society of Musculoskeletal Radiology, 2015.
Frank, C., Kobesova, A., Kolar, P. Dynamic Neuromuscular Stabilization & Sports Rehabilitation. The International Journal of Sports Physical Therapy, Volume 8, Number 1, 2013.
Kobesova, A., Dzvonik, J., Kolar, P., Sardina, A., Andel, R. Effects of shoulder girdle dynamic stabilization exercise on hand muscle strength. Isokinetics and Exercise Science 23, 2015.
Liebenson, C. Functional Training Handbook. Wolters Kluwer Health, 2014.
♠ Material do Curso DNS Exercise 1. Praga/Rep. Checa, 2015.
♠ Material do Curso DNS Exercise 1. Praga/Rep. Checa, 2017.
♠ Material do Curso DNS Exercise 2. Praga/Rep. Checa, 2017.
♠ Material do Curso DNS Clinical A. Praga/Rep. Checa, 2012.
♠ Material do Curso DNS Clinical A. Praga/Rep. Checa, 2017.
♠ Neumann, D. A. Cinesiologia do Aparelho Musculoesquelético: Fundamentos para Reabilitação – 2ª Ed. Elsevier, 2011.
Diagnosis and Treatment of Movement Impairment Syndromes. Ed. Mosby, 2001.
Ulm, R. Rintala, M., Jezkova, M., Kobesova, A. Czech Get-up. NSCA Coach, 2016.