Adaptação de um artigo publicado originalmente no periódico NSCA COACH (referência completa ao final do texto) falando sobre o exercício chamado Czech Get Up e sua relação com os princípios do DNS – Dynamic Neuromuscular Stabilization.
Nós, da Fortius, já havíamos feito uma adaptação desse artigo para um modelo em pdf, aos que quiserem baixar a versão em pdf (dividido em 2 partes) aí vão os links:
Essa versão do blog é ligeiramente diferente da versão em pdf, esta conta com uma ou outra nota que não existia e também a adição dos vídeos da execução do Czech Get Up, um deles filmado por um dos participantes do DNS Exercise Course 1, que promovemos em novembro de 2016, onde o nosso instrutor, Richard Ulm (um dos autores desse artigo), demonstra o Czech Get Up e o usa como um exercício para auxiliar a resolver um problema de diástase abdominal (ruptura na linha alba).
Boa leitura aos amigos.
Czech Get Up
Richard Ulm, Alena Kobesova, Michael Rintale, Matina Jezkova
Na mesma época em que o treinamento com kettlebells estava crescendo em popularidade nos Estados Unidos, Pavel Kolar, um fisioterapeuta com doutorado em pediatria, estava formulando sua abordagem de reabilitação na República Checa na Prague School of Rehabilitation (2) (N.T: Escola de Reabilitação de Praga, em uma tradução livre).![]() Kolar descende de uma longa linhagem de clínicos e fisioterapeutas de categoria internacional. Combinando a influência de médicos como Vladimir Janda, Karel Lewit e Vaclav Vojta com sua experiência como ginasta de elite, ele formulou uma explicação abrangente sobre movimento e função, que formam a base do Dynamic Neuromuscular Stabilization – DNS (N.T: Uma tradução livre de Dynamic Neuromuscular Stabilization seria Estabilização Neuromuscular Dinâmica, mas optarei por deixar o nome original durante o texto).
Kolar descende de uma longa linhagem de clínicos e fisioterapeutas de categoria internacional. Combinando a influência de médicos como Vladimir Janda, Karel Lewit e Vaclav Vojta com sua experiência como ginasta de elite, ele formulou uma explicação abrangente sobre movimento e função, que formam a base do Dynamic Neuromuscular Stabilization – DNS (N.T: Uma tradução livre de Dynamic Neuromuscular Stabilization seria Estabilização Neuromuscular Dinâmica, mas optarei por deixar o nome original durante o texto). Este artigo irá examinar os conceitos principais desta abordagem e sua utilidade no campo da preparação física.
Este artigo irá examinar os conceitos principais desta abordagem e sua utilidade no campo da preparação física.
O Czech get-up usa posições consistentes com os princípios do DNS e da Cinesiologia desenvolvimental – os aspectos neurofisiológicos do sistema de maturação locomotor (2). Ao usar um kettlebell durante o Czech get-up, é colocada uma resistência em cima dos padrões de movimento vistos nos exercícios do DNS e da Cinesiologia Desenvolvimental. Isto permite ao Czech get-up ativar e treinar estratégias de estabilização ideais e a eficiência do movimento, que é o objetivo primário do DNS (2,3).
ASPECTOS CHAVE DA ABORDAGEM DE KOLAR
Alguns dos conceitos chave e princípios da abordagem do DNS de Kolar são a Cinesiologia Desenvolvimental e o Sistema Integrado de Estabilização Espinal.
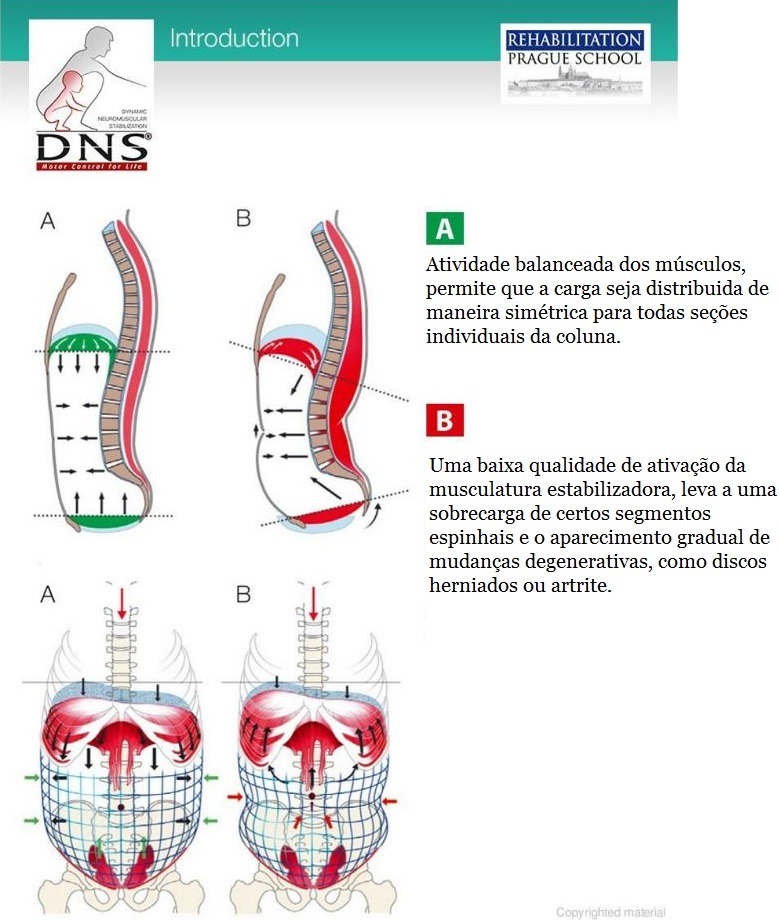
A explicação de Kolar a respeito do sistema integrado de estabilização espinal reconhece a complexidade do movimento e demonstra como todo corpo trabalha junto para a estabilização e o movimento (2). Enquanto todo corpo contribui para estabilização da coluna, no centro do sistema integrado de estabilização espinal estão: diafragma, assoalho pélvico, toda parede abdominal e os pequenos músculos intersegmentais da coluna (Ex: multífidos lombares) (1, 2).
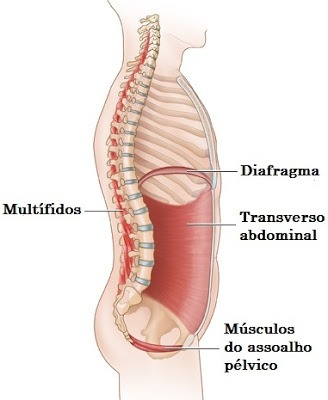 Estas estruturas trabalham juntas para gerar pressão dentro do abdome (Pressão intra-abdominal) que equilibrada com os extensores da coluna a mantém em uma posição estável e alongada, algo necessário para uma função otimizada (2).
Estas estruturas trabalham juntas para gerar pressão dentro do abdome (Pressão intra-abdominal) que equilibrada com os extensores da coluna a mantém em uma posição estável e alongada, algo necessário para uma função otimizada (2).
Um evento crítico no processo de estabilização é a contração concêntrica do diafragma, durante a qual, o tendão central do diafragma desce em direção à pelve. Esta ação empurra o conteúdo abdominal para baixo e para fora, ativando excentricamente toda circunferência da parede abdominal e o assoalho pélvico (4).
Todas estas estruturas trabalham juntas para gerar e regular a pressão intra-abdominal para atender as demandas de qualquer tarefa que os indivíduos estejam desempenhando (2). Quer seja juntar uma caneta do chão ou fazendo um levantamento terra com 400 kg, o movimento é ancorado pela pressão intra-abdominal.
(N.T: Esse conceito de pressão intra-abdominal é chave para entendermos como o DNS considera a estabilização da coluna. Através da descida do diafragma, e da consequente pressão interna gerada, ocorre a CONTRAÇÃO EXCÊNTRICA de toda parede abdominal. Esse conceito de contração excêntrica está em direta oposição ao conceito do encolhimento abdominal, ou como chamam em inglês “draw in”, que seria CONTRAÇÃO CONCÊNTRICA da parede abdominal).
Além de enfatizar o papel desempenhado pelo diafragma na estabilização, o DNS é construído sobre os princípios científicos da Cinesiologia Desenvolvimental. Durante o desenvolvimento, a criança está amadurecendo fisicamente, emocionalmente e neurologicamente. Boa parte desse desenvolvimento ocorre durante os 15 primeiros meses de vida (2).
 Nesse período, a criança adquire a capacidade de alcançar certas posições (Ex: Tripla flexão, quadrúpede, agachamento, etc.) e de executar certos movimentos, como: girar, engatinhar, ficar em pé e caminhar, sem que seja ensinada a fazê-lo (2). Estes movimentos são fundamentais e mais tarde tornam-se a fundação de movimentos mais complexos, como arremessar ou dar um pique.
Nesse período, a criança adquire a capacidade de alcançar certas posições (Ex: Tripla flexão, quadrúpede, agachamento, etc.) e de executar certos movimentos, como: girar, engatinhar, ficar em pé e caminhar, sem que seja ensinada a fazê-lo (2). Estes movimentos são fundamentais e mais tarde tornam-se a fundação de movimentos mais complexos, como arremessar ou dar um pique.
Após estudar a cinesiologia desenvolvimental e observar como bebês saudáveis e crianças se movem, Kolar propôs o conceito do DNS de centramento articular. Esse conceito é um fenômeno por meio do qual o sistema locomotor mantém um posicionamento articular ideal através de todo movimento (2, 3, 4).
Tal posicionamento usa o máximo contato interósseo (conexão entre os ossos) possível para uma transferência de carga eficiente (3). Isto requer, e promove, uma co-ativação balanceada de todos músculos que cercam uma articulação.
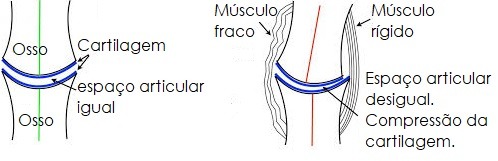
O centramento articular é um fenômeno sistemático de todo corpo para manter o posicionamento apropriado através do movimento. Um posicionamento ruim, ou descentramento, de uma articulação irá afetar o centramento de todas as outras articulações no corpo (Ex: Pronação excessiva do pé pode afetar o posicionamento da coluna e pelve, que por sua vez afeta o posicionamento do ombro) (2).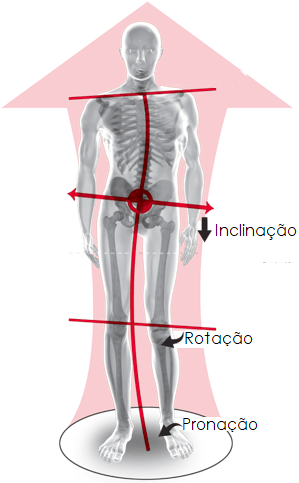 O centramento articular provê uma distribuição de forças através da articulação de maneira equilibrada e eficiente. Isto, simultaneamente, protege as estruturas passivas e permite à articulação transferir mais força, o que pode levar a um risco de lesão diminuído e melhorar a performance (2, 3, 4).
O centramento articular provê uma distribuição de forças através da articulação de maneira equilibrada e eficiente. Isto, simultaneamente, protege as estruturas passivas e permite à articulação transferir mais força, o que pode levar a um risco de lesão diminuído e melhorar a performance (2, 3, 4).
Para restaurar o movimento ideal e o centramento articular de seus pacientes, Kolar construiu um sistema de reabilitação usando as posições e movimentos observados durante o desenvolvimento (2). Estes exercícios são baseados na cinesiologia desenvolvimental e podem ser úteis por 2 razões principais:
1 – Os exercícios treinam o sistema integrado de estabilização espinal porque os movimentos enfatizam a integração de todo sistema locomotor em um processo de estabilização, o que permite aos exercícios treinarem o atleta de maneira mais efetiva para alcançar o centramento articular.
2 – Os exercícios usam posições familiares ao sistema nervoso central, o permitindo a (re)ativar mais facilmente estratégias de movimento apropriadas para a função e performance ideais.
A seguir forneceremos exercícios específicos do DNS que imitam as posições vistas durante o desenvolvimento motor usando o Czech get-up.
MARCOS POSICIONAIS NO DESENVOLVIMENTO INFANTIL
Abaixo alguns exemplos de marcos posicionais no desenvolvimento que são usados comumente no DNS:
DESENVOLVIMENTO DO SISTEMA INTEGRADO DE ESTABILIZAÇÃO ESPINAL
A figura mostra uma criança aos 4 meses de desenvolvimento. Esta posição ocorre tipicamente quando a criança começa a integrar o diafragma com a parede abdominal e o assoalho pélvico para gerar pressão dentro do abdome (2, 3).
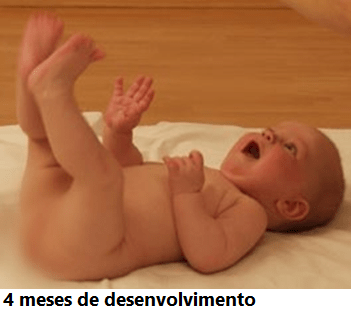
Essa posição é particularmente importante em virtude da capacidade de gerar e regular pressão dentro do abdome ser um pré-requisito para todos os movimentos, não importando o quão de baixa intensidade sejam.
Está é uma posição comum usada na reabilitação e treinamento, para aumentar a capacidade do atleta gerar pressão intra-abdominal adequadamente para executar movimentos mais complexos como: agachamento, avanço, supino, etc. (N.T: Vale a pena enfatizar que o mecanismo destacado: “Gerar pressão dentro do abdome” seja a capacidade básica mais importante a ser adquirida, antes de se fazer qualquer progressão).
PADRÃO ROTACIONAL
(N.T: Padrão de virar/girar) A figura mostra a criança virando da base supinada para base pronada (N.T: De barriga para cima – decúbito dorsal PARA De barriga para baixo – decúbito ventral), um movimento que ocorre tipicamente por volta dos 6 meses de desenvolvimento (2,3).
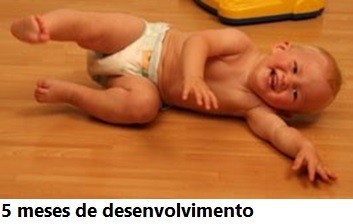 Este movimento é construído em cima da capacidade de gerar pressão intra-abdominal e é quando a criança começa a ativar seus sistemas de suporte miofasciais oblíquos: Anterior e Posterior.
Este movimento é construído em cima da capacidade de gerar pressão intra-abdominal e é quando a criança começa a ativar seus sistemas de suporte miofasciais oblíquos: Anterior e Posterior.
(N.T: O termo que se usa em inglês é “Sling”, para o qual não existe uma boa correspondência em português, como estes “slings” agem como um suporte para as cadeias miofasciais, optei por chamar estas conexões de: Sistemas de Suporte Miofascial, mais como uma descrição da função do que um nome apropriado. Estas conexões de suporte também são chamadas de subsistemas, aos que quiserem conferir mais informações sobre os subsistemas oblíquos confiram os artigos no Blog Limatreinamento: Subsistema Oblíquo Anterior e Subsistema Oblíquo Posterior).
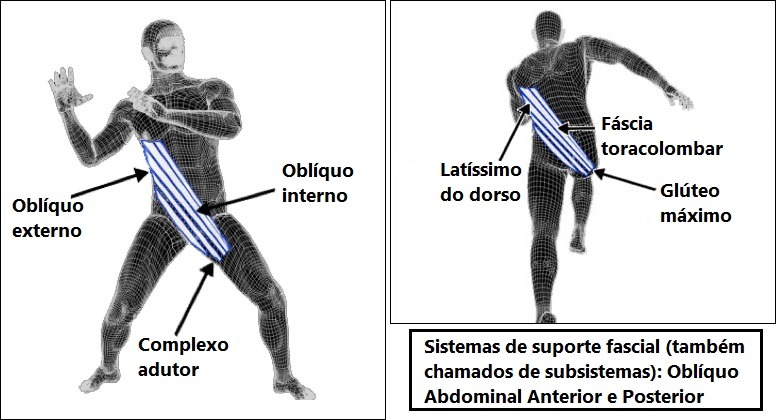
Estes sistemas de suporte oblíquos são necessários para virtualmente qualquer movimento, mas são particularmente importantes para movimentos rotacionais, como lançar um disco ou bater em uma bola de tênis.
POSIÇÃO DO TRIPÉ
A figura mostra a criança na posição do tripé, que é alcançada tipicamente entre 9 e 11 meses de desenvolvimento (2). Esta é uma posição importante porque é a primeira vez que que a criança é capaz de sustentar parcialmente seu peso corporal usando todo o pé. Esta é uma posição de transição, onde a criança muda de um padrão de rotação, onde os segmentos de suporte dos membros inferiores e superiores estão no mesmo lado (padrão ipsilateral), para um padrão de engatinhar, onde o segmento de suporte do membro superior está do lado oposto ao segmento de suporte do membro inferior (padrão contralateral) (3).
Esta é uma posição de transição, onde a criança muda de um padrão de rotação, onde os segmentos de suporte dos membros inferiores e superiores estão no mesmo lado (padrão ipsilateral), para um padrão de engatinhar, onde o segmento de suporte do membro superior está do lado oposto ao segmento de suporte do membro inferior (padrão contralateral) (3).
Este é o momento onde a criança torna-se mais estável, em preparação a movimentos como alcançar objetos, ficar em pé e eventualmente caminhar.
PRINCÍPIOS CHAVE NO DESEMPENHO DO CZECH GET-UP
A seguir 3 princípios chave a serem seguidos enquanto se desempenha o Czech get-up:
- A coordenação da função de respiração e coordenação do diafragma precisa ser mantida através de todo o movimento.
- Use o peso que permita a qualidade de estabilização dinâmica e centramento articular ideais através de todo movimento.
- O propósito do Czech Get-up é melhorar a capacidade do atleta em manter o centramento articular através de todo movimento.
POSIÇÕES DO CZECH GET-UP
(N.T: Execução completa do Czech Get Up)
POSIÇÃO 1 (Posição de Largada)
A posição de largada começa com o atleta de lado, segurando o kettlebell com as 2 mãos. Esta posição não é vista no desenvolvimento motor, mas é necessária para transferir o kettllebell com segurança para a posição inicial em base supinada. O atleta deve manter o kettlebell próximo ao peito enquanto faz a rotação para a próxima posição com segurança (N.T: seria uma posição de transição).
POSIÇÃO 2 (Posição Supinada – 8 semanas)
Mantendo o kettlebell próximo ao peito, o atleta irá girar da posição em decúbito lateral para a posição supinada. Usando as 2 mãos ele deve empurrar o kettlebell para cima, para uma posição diretamente sobre um ombro. O cotovelo deve estar ligeiramente flexionado e o kettlebell deve ser segurado com a mão ligeiramente aberta, o punho em ligeiro desvio radial e os metacarpos abduzidos.
Esta posição do braço e da mão deveria ser mantida através de toda sequência do Czech get-up. Nesta posição, o atleta estabelece a estabilização no plano sagital com os quadris flexionados em aproximadamente 45º, os joelhos flexionados em 90º e os tornozelos em dorsiflexão. Ele irá ter a cabeça, cintura escapular, pés e articulação lombossacral como base de suporte no solo. 
Esta posição é consistente com uma criança com menos de 3 meses de desenvolvimento.
POSIÇÃO 3 (Posição Supinada / Posição de Tripla Flexão 3 meses)
O atleta deve usar o sistema integrado de estabilização espinal para ativar o abdome (N.T: De forma excêntrica, como explicado anteriormente), para gerar pressão intra-abdominal suficiente e estabilização sagital. Uma vez que o abdome esteja pressurizado, o atleta deve flexionar os quadris a 90-110º sem que qualquer movimento seja observado na coluna e na parte inferior das pernas.
Isso irá fazer com que ele entre em uma posição de tripla flexão, consistente com uma criança com aproximadamente 3 meses de desenvolvimento. O atleta deve continuar a pressurização do abdome para lentamente levantar a pelve do solo sem mover os quadris ou as pernas enquanto transfere o suporte sobre a articulação toracolombar. 
Esta posição é comumente alcançável quando a criança alcança 4 meses de desenvolvimento. Através de toda transição o diafragma e o assoalho pélvico mantém uma relação paralela e uma coordenação entre a respiração e estabilização (1).
POSIÇÃO 4 (Posição em Decúbito Lateral / Rotação Parcial – 5 meses)
A partir da posição supinada, o atleta deve iniciar o processo de rotação ao fornecer uma base de suporte com o braço e o quadril do lado que não está sustentando o kettlebell. Através desta transição, ele deve manter a relação paralela entre o diafragma e o assoalho pélvico.
Enquanto isso, o quadril contralateral, do lado que está sustentando o kettlebell, deve abduzir, fazer a rotação externa e levemente estender em preparação para o suporte. 
Esta posição é consistente com uma criança entre 4 a 6 meses de desenvolvimento. A rotação completa da base supinada para a pronada é tipicamente alcançada ao redor dos 6 meses de desenvolvimento.
POSIÇÃO 5 (Sentado em Posição Oblíqua – Baixa)
O atleta deve continuar o processo de rotação enquanto está suportado pelo cotovelo. Esta posição é chamada de sentado em posição oblíqua – baixa, e é consistente com uma criança com aproximadamente 7 meses de desenvolvimento, antes de alcançar a posição de tripé.
Nesta posição, o cotovelo está diretamente sob o ombro e o atleta é suportado pelo quadril e cotovelo. O quadril e joelho devem estar parcialmente flexionados e o quadril e joelho contralaterais devem estar flexionados com o pé todo apoiado no solo.
Posição 6 (Sentado em Posição Oblíqua – alta)
A seguir, o atleta irá tirar o cotovelo do solo, apoiar-se sobre a mão aberta e manter o cotovelo estendido. Nesta transição, as pernas não se movem muito e o suporte é mantido pelo glúteo médio e o quadril. Esta posição é chamada de sentado em posição oblíqua – alta, e é tipicamente adquirida por volta dos 8 meses de desenvolvimento.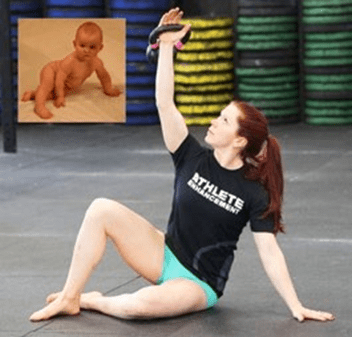
POSIÇÃO 7 (Posição do Tripé)
O atleta deve fazer a transição entre sentado em posição oblíqua – alta para a posição do tripé. O que envolve a transferência de peso do quadril de suporte e da parte lateral da coxa para a porção lateral do joelho do mesmo lado.
A medida que suporte se transfere distalmente (N.T: Do quadril e lateral da coxa para o joelho), o quadril de suporte deve abduzir, estender e fazer a rotação externa para tirar a pelve do solo. Ao mesmo tempo, a perna de cima deve dar um passo para que se alcance a posição do tripé.
Esta posição é adquirida ao redor dos 9 – 11 meses de desenvolvimento. Nesta posição, o atleta está suportando seu peso corporal com o joelho, pé e a mão aberta.
Todo pé deve estar recebendo a sobrecarga, distribuindo a pressão de maneira igual entre o calcanhar, a primeira articulação metatarsofalangeana e a quinta articulação metatarsofalangeana.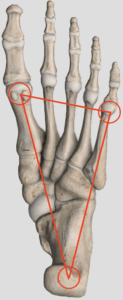
(N.T: Isto é muitas vezes chamado do tripé do pé, onde a descarga de peso está bem distribuída entre estes 3 pontos. Não confundir com a posição do tripé apresentada aqui. Porém nos 2 casos existem 3 pontos de apoio).
Isso ajuda a controlar a posição do joelho e é necessário para um posicionamento ideal da pelve. O pé e a mão devem receber uma descarga de peso equivalente. O que é crítico para fornecer um suporte com os segmentos periféricos bem centrados.
POSIÇÃO 8 (Posição com Joelho Alto)
O atleta deve se mover para uma posição de joelho alto (N.T: Esta posição é também chamada de “Meio ajoelhada”. Mas os autores a chamaram, em inglês, de “High Kneeling”, joelho alto em uma adaptação livre), onde seu peso corporal é sustentado apenas pelo joelho e pelo pé. Uma distribuição de carga apropriada sobre o pé precisa ser alcançada nesta posição antes da progressão do atleta. 
A posição de joelho alto é alcançada tipicamente por volta dos 10 meses de desenvolvimento.
 POSIÇÃO 9 (Posição em Pé)
POSIÇÃO 9 (Posição em Pé)
Da posição de joelho alto, o atleta deveria progredir para a posição em pé. Através desta transição, de joelho alto para ficar em pé, a estabilização e o centramento articular devem ser mantidos. Ficar em pé em um espaço livre (N.T: Sem qualquer suporte ou auxílio) não é alcançado pela criança até por volta dos 12 – 14 meses de desenvolvimento.
POSIÇÃO 10 (Posição Agachada)
A partir da posição em pé, o atleta deve descer em uma posição agachada (N.T: Ou Posição de Agachamento), onde possa manter o centramento articular com uma estabilização apropriada através da coluna. Muitos irão ter dificuldades com este movimento por terem falta de algum, ou alguns, dos muitos requisitos necessários para alcançar esta posição (Ex: amplitude de movimento na extensão torácica, mobilidade do quadril ou estabilidade lombopélvica).
O atleta deve descer até uma amplitude em que possa manter a qualidade de movimento. A posição agachada é tipicamente adquirida por volta dos 10 – 12 meses de desenvolvimento. A partir da posição agachada, o atleta volta a ficar de pé e faz todo o movimento reverso (N.T: revertendo todos os passos anteriores detalhados no texto) até alcançar a posição inicial.
CONCLUSÃO
Demonstrar comando e controle através de cada posição e transições é o objetivo do movimento completo. É importante para atletas e preparadores físicos lembrar que o DNS enfatiza a qualidade sobre a velocidade, força ou quantidade de movimento.
Quer saber mais sobre o assunto? Confira a palestra “DNS no Dia à Dia”


N.T: O vídeo abaixo (com tradução) foi gravado durante o curso do DNS Exercise 1 em Porto Alegre/2016 e trata de detalhes da execução do Czech Get up e a possibilidade de aplicação desse exercício, ou partes dele, em um caso de diástase abdominal. O ministrante do curso, Richard Ulm, é um dos autores desse artigo.
REFERÊNCIAS
-
Bordoni, B., Zanier, E. Anatomic connections of the diaphragm: influence of respiration on the body. Journal of Multidsciplinary Healthcare 6: 281-291, 2013.
- Frank, C., Kobesova, A., Kolar, P. Dynamic Neuromuscular stabilization in sports rehabilitation. International Journal of Sports Physical Therapy February 8(1): 62-73, 2013.
- Kobesova, A., Kolar, P. Developmental kinesiology: Three levels of motor control in the assessment and treatment of the motor system. Journal of Bodywork and Movement Therapies 18(1): 23-33, 2013.
-
Kobesova, A., Safarove, M., Kolar, P. Dynamic neuromuscular stabilization: Exercise in the developmental positions to achieve spinal stability and functional joint centration. In: Hutson, M, and Ward, A (Eds.), Oxford Textbook of Musculoskeletal Medicine. Oxford University Press; 66-83, 2015.