Um bom artigo do site ScienceForSport falando de algo que muitos de nós gostamos de referir (soa bem) mas que não é tão discutido assim: O aprendizado e controle motor.
Aprendizado e Controle Motor
Harjiv Singh
Conteúdo
- Resumo
- O que é aquisição de uma habilidade?
- Por que a aquisição de uma habilidade é importante?
- Estágios do aprendizado motor
- Teorias do aprendizado motor
- Problemas com a aquisição de uma habilidade
- Futuras pesquisas
- Referências
Resumo – Aprendizado e Controle Motor
Em geral habilidades motoras são tarefas que requerem controle voluntário dos movimentos articulares e segmentos corporais para alcançar um objetivo. Alguns exemplos incluem andar de bicicleta, caminhar, saltar, correr e o levantamento de peso olímpico.

O aprendizado e execução dessas habilidades são chamados pelos cientistas do movimento de aprendizado e controle motor ou “Aquisição de Habilidade”.
(N.T: “Skill acquisition” no original em inglês, um termo bastante utilizado nessa língua, mas não tanto em português. Aquisição de Habilidade era o título original do artigo que acabei mudando pelo motivo de não ser um termo tão familiar em nossa língua. Em outras partes do texto está traduzido como “aquisição de UMA habilidade” ou até colocado no plural “aquisição de habilidades”).
Seja alcançar a completa extensão do joelho após uma cirurgia de reconstrução do ligamento cruzado anterior (LCA), reaprender a andar ou aumentar a proficiência no arremesso do basquete, o estudo do aprendizado e controle motor desempenha um papel integral no desempenho e na reabilitação dessas habilidades.
Esse artigo é uma introdução geral à ciência e filosofia do aprendizado e controle motor. Após definir vários termos chave, revisaremos os estágios de aprendizagem e apresentaremos 2 teorias do controle motor, enquanto prestamos tributo aos que apresentaram essa ciência ao mundo.
O que é aquisição de uma habilidade?
Aquisição de uma habilidade, também referido como aprendizado e controle motor é uma ciência interdisciplinar de intenção, percepção, ação e calibragem da relação entre o executante ⇔ ambiente.
Em particular, aquisição de uma habilidade é um termo genérico que abrange o conhecimento de quais variáveis neurológicas e comportamentais influenciam a adaptação do sistema nervoso central em resposta ao aprendizado ou reaprendizado de uma habilidade motora (5).
Em termos mais simples, aquisição de uma habilidade se refere ao controle voluntário sobre o movimento de articulações e segmentos corporais em um esforço para resolver um problema relacionado com uma habilidade motora e alcançar o objetivo de uma tarefa.
(N.T: O vídeo a seguir mostra de forma didática os estágios de aprendizado de uma habilidade motora. Porém está em inglês e sem opção de legendas).
Por que a aquisição de uma habilidade é importante?
O estudo do aprendizado e controle motor é uma abordagem compreensiva para entender o movimento humano fora das tradicionais intervenções biomecânicas. Como uma ciência interdisciplinar, a aquisição de uma habilidade envolve especialistas em neurociência, fisiologia, psicologia, biomecânica e treinamento, como uma avenida a fim de pesquisar como o sistema neuromuscular funciona para ativar e coordenar os músculos e membros envolvidos em desempenhar uma habilidade motora.
Embora existam muitas teorias em torno da aquisição de habilidades e as ferramentas práticas usadas para melhorá-la, ainda existe uma considerável falta de conhecimento que detalhe exatamente o que é adquirido durante a aquisição de uma habilidade e que práticas são melhores no desenvolvimento dessas habilidades.
Araújo e Davids [1] tentaram responder essa questão no artigo intitulado: “What Exactly Is Acquired During Skill Acquisition?”
(N.T: O que exatamente é adquirido durante a aquisição de habilidade?).
Eles concluíram que a aquisição de uma habilidade é definida como um processo teleonômico que envolve um ajuste contínuo. A razão deles usarem as palavras “ajuste contínuo” se dá porque isso ocorre através da criação e adaptação de uma relação funcional com o ambiente, ao invés da formação de uma entidade [1]. Em outras palavras, sempre sendo adaptada (a habilidade) ao ambiente.
(N.T: A busca no termo usado: Teleônomico, me disse que diz respeito a teleonomia, algo que se ajusta a determinada finalidade).
Estágios do aprendizado motor
Desde sua criação, a aquisição de habilidades evoluiu de um subcampo da psicologia para sua própria vasta interpretação da relação cérebro-comportamento. Embora existam muitas teorias a respeito (discutidas mais adiante), pioneiros ao redor do mundo concordam, no entanto, que uma característica importante da aquisição de uma habilidade é que as pessoas passam por diferentes estágios, frequentemente referidos como “estágios da aprendizagem”.
Existem 3 interpretações predominantes dos estágios do aprendizado motor. Fitts e Posner [3] foram os primeiros a desenvolver um contínuo de prática em três estágios, enquanto Ann Gentille [4] veio vários anos depois e introduziu um modelo em dois estágios. Nikolai Bernstein [2], cujo trabalho foi recentemente publicado em inglês, foi um neurofisiologista que era interessado especificamente no controle motor. Ele teorizou a evolução do movimento em uma abordagem abstrata, ainda que baseada em evidência.
Embora os 3 modelos pareçam dividir pontos em comum, eles diferem em suas próprias perspectivas de como o par percepção ⇔ ação desempenha um papel na aquisição de uma habilidade, com Bernstein argumentando que uma habilidade motora é aprendida por meio da resolução de um problema motor.
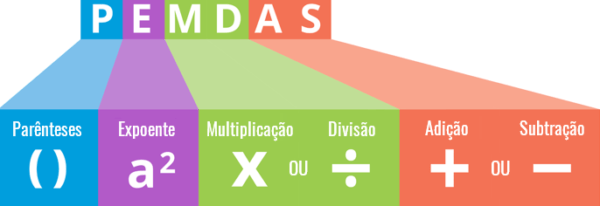
Para colocar em termos mais simples, as teorias de Fitts, Posner e a de Gentile são como aprender a tabuada, enquanto que a teoria de Bernstein é como aprender PEMDAS e resolver problemas complexos. Para um melhor entendimento teremos vários exemplos.
(N.T: PEMDAS é um acrônimo para: Parênteses, Expoentes, Multiplicação, Divisão, Adição e Subtração. Tendo ao menos duas operações numa equação, a ordem das letras em PEMDAS diz qual operação se deve fazer em primeiro, segundo, terceiro lugar, etc., até que a equação seja resolvida. No caso de haver parênteses numa equação, PEMDAS diz que se deve resolver o interior do parênteses antes de passar para o resto da equação).

Fitts e Posner – Estágios do aprendizado motor
No final da década de 1900, Fitts e Posner [3] desenvolveram um modelo de prática em 3 estágios.
- Estágio 1: Estágio Cognitivo.
- Estágio 2: Estágio Associativo.
- Estágio 3: Estágio Autônomo.
♦ O primeiro estágio foi chamado de “Cognitivo”, onde o iniciante primariamente foca no que e como fazer. Para colocar um contexto, um jogador de voleibol pode perguntar: – O quão alto deve ser meu saque?

O aprendiz presta bastante atenção às informações que recebe do treinador. Esse estágio normalmente exibe muitos erros, grandes ganhos e falta de consistência. O treinador desempenha um papel crucial, já que há uma linha tênue entre o feedback ser uma tarefa cognitiva e não uma intervenção mecânica.
Outro nome para esse estágio é “Estágio Verbal Motor”.
♦ O segundo estágio desse modelo é conhecido como “Associativo”, onde, após uma quantidade não especificada de prática, o desempenho começa a melhorar. A pessoa agora está associando dicas específicas para resolver o problema motor que está enfrentando.
Pequenos erros e melhor consistência são demonstrados, em virtude dos fundamentos básicos já estarem estabelecidos e agora estão sendo refinados. Naturalmente, a variabilidade do desempenho irá diminuir nesse estágio. O aprendiz despende muito esforço consciente, muitas vezes colocando seu foco primariamente nos movimentos corporais.
(N.T: Há um corpo de estudos muito grande mostrando que o foco interno, em movimentos das partes do corpo, diminui a performance. Uma boa fonte de pesquisa são os muitos artigos da Dra Gabriele Wulf. Logicamente que dentro do contexto do artigo, o foco em movimentos dos segmentos corporais é algo natural para o iniciante).
Outro nome para esse estágio é “Estágio Motor”.
♦ O terceiro estágio desse modelo é o “Autônomo”, onde a habilidade se tornou automática. Existe pouco ou nenhum pensamento consciente e o aprendiz frequentemente pode fazer outra tarefa ao mesmo tempo, como manter uma conversa.
O autoaprendizado se torna enorme nessa fase, porque executantes habilidosos conseguem detectar seus próprios erros e fazer os ajustes necessários.
Fitts e Posner [3] deixaram claro que não serão muitos que irão alcançar esse terceiro estágio. Como referenciado por Magill e Anderson [5], a instrução do profissional ao longo das variáveis da tarefa e estrutura de prática determinam o sucesso desse estágio.
Ann Gentile – Estágios do aprendizado motor
Em 1972, Ann Gentile [4] propôs um modelo de progressão em 2 estágios, visualizando o aprendizado de habilidades motoras como sendo relevante para o objetivo.
- Estágio 1: Estágio inicial
- Objetivo 1: Adquirir um padrão de movimento.
- Objetivo 2: Discriminar entre condições regulatórias e não regulatórias.
- Estágio 2: Estágios posteriores
- Objetivo: Adaptação, consistência e economia.
Nos estágios iniciais de aprendizado, listados abaixo na tabela como um modelo de progressão de prática, o padrão de movimento é um de dois objetivos importantes para o aprendiz.
Ele se depara com a difícil tarefa de se adaptar às condições regulatórias ou características do contexto ambiental em que as características do movimento precisam estar de acordo (com o contexto), para que o objetivo da ação seja alcançado [5]. Por objetivo da ação representamos os meios pelos quais o objetivo da tarefa é alcançado.
Por exemplo, se um levantador no voleibol estiver usando uma bola de levantador, que tende a ser mais pesada que uma bola regular, ele precise colocar o foco em desenvolver as características do braço e da mão que correspondam a isso.
(N.T: Bola de levantador, tradução livre de “Setters ball”, uma bola de vôlei um pouco mais pesada do que a normal. A da imagem abaixo pesa entre 445 e 496 gramas, em contraposição, uma bola regulamentar pesa entre 260-280 gramas).
Pense na diferença entre levantar um peso de 10 e 50kg. Existe um padrão de movimento diferente que melhor se adapta a cada objetivo. Outro exemplo é após uma reconstrução de Ligamento Cruzado Anterior (LCA) do joelho, um indivíduo pode precisar treinar a subida de escadas. Condições regulatórias incluem o número de degraus, o tamanho de cada degrau, o formato da escadaria, entre outros.
Junto com isso, o segundo objetivo é discriminar entre condições regulatórias e não regulatórias dentro de um contexto ambiental.
Condições não regulatórias são as características do ambiente que não têm influência ou que permanecem como influência indireta nas características do movimento necessárias para alcançar um objetivo da ação [5].
Usando novamente o LCA como exemplo, a cor das paredes ao redor é uma condição não regulatória. É importante salientar que a literatura está se concentrando mais nas influências indiretas, particularmente quando fornecem escolhas ao aprendiz [7].
A fim de dominar esses dois objetivos, o aprendiz precisa explorar uma variedade de soluções de movimento. Ao fazê-lo, ele se engaja em uma resolução de problemas cognitivos.
O padrão de movimento estabelecido torna-se um conceito generalizado, nem consistente, nem eficiente. Os últimos estágios do aprendizado (tabela a seguir) são onde o aluno adquire 3 características gerais:
- Ele precisa adaptar os padrões de movimento para restrições específicas;
- Aumentar a consistência na resolução do problema motor e;
- Desempenhar a habilidade com economia de esforço.
Para facilitar isso, o professor precisa identificar as variáveis da tarefa, definir os principais parâmetros variáveis e induzir os efeitos de interferência contextual de acordo.
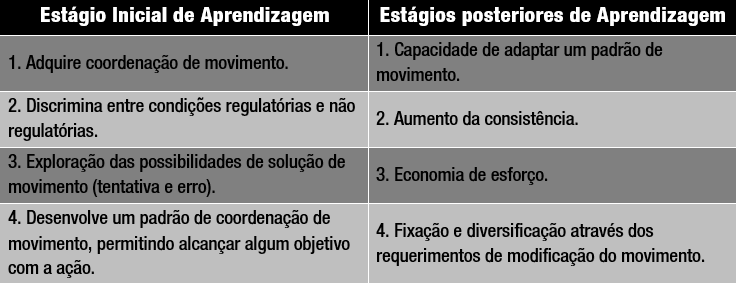
Tabela – Estágios do Modelo de Progressão da Prática de Aprendizagem (Recriada em referência a Magill e Anderson, 2007).

Nikolai Bernstein – Estágios do aprendizado motor
Embora o modelo de dois estágios de Ann Gentile continue a ser usado hoje em dia, muitos especialistas em aprendizado e controle motor atualmente advogam pelo tesouro perdido de Nikolai Bernstein.
(N.T: Tesouro perdido em virtude do trabalho do neurofisiologista soviético Nikolai Bernstein só começar a ter alguma notoriedade no ocidente após sua morte no final da década de 60, quando seu livro “The Co-ordination and Regulation of Movements” foi traduzido do russo para o inglês em 1967. O livro é uma coletânea de artigos originalmente publicados em russo nas décadas de 30, 40, 50 e 60).
Ele descreveu o processo de aprendizado assim:
- Primeira fase: Resolvendo um problema motor, que nível assume o papel principal?
- Segunda fase: Desenvolvendo uma representação motora ou estratégia para abordar o problema.
- Terceira fase: Identificar as correções sensoriais mais apropriadas.
- Quarta fase: As correções são entregues ao segundo plano e são engajadas sem percepção consciente.
- Quinta fase: Padronização.
- Sexta fase: Estabilização.
Bernstein [2] rapidamente argumentou que a aquisição de uma habilidade inicia ao resolver um problema motor, destacando o termo “problema”, fornecendo uma descrição abrangente do quão difícil é na verdade a aquisição de uma habilidade.
Pense na chave da sua casa, a única maneira da porta abrir é se a chave couber perfeitamente no buraco da fechadura. No entanto, no processo de fazer isso é preciso tirar a chave do bolso, levar a chave pelo espaço até a fechadura e através de um processo de precisão da preensão manual e rotação da chave a porta irá abrir.

Detalhando um pouco mais o exemplo, a única maneira de aprender essa tarefa é acumulando experiência ao crescer, onde você alcançou a bochecha de sua mãe, pegou o brinquedo da mesa, colocou blocos em seu cercadinho e assim por diante.
Bernstein, de forma criativa, simplificou isso através de 4 níveis:
♦ Em primeiro lugar está o nível principal, o nível de ações (nível D) que é responsável por planejar e exercer o controle.
Então vem os níveis evolucionários mais velhos, que fornecem mecanismo para a construção do movimento.
♦ Bernstein colocou isso simplesmente como “coordenar os movimentos com o espaço externo” (nível C);
♦ Organizar sinergias musculares (nível B);
♦ Regular o tônus muscular (nível A).
“Repetição sem repetição” é uma famosa frase de Bernstein que nos lembra que os padrões de movimento nunca serão exatamente iguais. Portanto, é imperativo não se engajar em práticas rotineiras, repetitivas, quando a ideia de transferência envolver situações variáveis e complexas – isso é alcançado através da variação dos parâmetros de cada nível.
É importante pensar a respeito de como evoluímos como humanos, datando de milhões de anos atrás onde andar apoiado nos punhos era a forma de locomoção apresentada por nossos ancestrais, até que descobriram como andar eretos devido a uma interação complexa de todos os níveis do ambiente.
(N.T: Na verdade, os fósseis dos primeiros hominídeos encontrados, Australopithecus afarensis, a famosa Lucy, compartilhavam as mesmas características anatômicas na articulação do punho de gorilas e chimpanzés. Esses primeiros hominídeos viveram entre 3,1 e 4 milhões de anos atrás, mas já andavam eretos. Então acredita-se que essa característica anatômica de locomoção apoiado nos punhos seja um traço herdado por uma espécie ancestral ainda mais antiga. Já que espécies que vieram depois, como o Australopithecus africanus não exibem traços dessas adaptações para locomoção apoiados nos punhos).

Outro exemplo é: Se não fosse pelo nível A, como um sapo aprende a sair da água para andar e pular? De fato, no aprendizado do saque no voleibol o treinador inicia do nível A e após um período de treino e exercícios chega ao nível D. A melhor parte é que o que aprendemos nesses níveis se traduz para outras tarefas (Ex.: O saque do voleibol imita o arremesso do beisebol).
(N.T: Aqui o autor dá a entender que o aprendizado de uma habilidade → saque do vôlei, terá alguma transferência para outra habilidade → arremesso do beisebol. Não acredito que isso ocorra).

A segunda fase é desenvolver uma estratégia para abordar o problema. Isso pode ser relacionado com o “Estágio Cognitivo” de Fitts e Posner [3], onde o aluno está descobrindo como alcançar o objetivo da tarefa. De acordo com Bernstein, o aluno recruta e atribui funções aos níveis inferiores.
Por exemplo, quais músculos e quanto da capacidade de contração serão recrutados. Se você está sendo perseguido por uma cascavel, haverá claramente mais contração muscular do que se estivesse correndo ao redor de um campo de futebol. De qualquer modo, você ainda está engajado na habilidade motora da corrida, mas com diferentes objetivos na tarefa.
A terceira fase é identificar as correções sensoriais mais apropriadas. Essa fase é importante porque o aluno deveria saber como sentir a habilidade. Mais importante, como sente a habilidade em diferentes contextos?
Em poucas palavras, esses estágios iniciais são estágios de planejamento onde estamos cautelosamente construindo os limites em que a ação ocorrerá.
A quarta fase é quando as correções se dão em segundo plano, sem percepção consciente – é quando dá o “estalo” [5].
O que separa Bernstein dos outros é o papel das correções sensoriais [2], como declarado acima, lançando luz ao controle de feedback automático (N.T: “Retorno de informações” seria uma boa tradução para “feedback”). Pense em como é fácil para você tirar a chave do bolso e abrir a porta. Muitos pesquisadores mencionam isso como a estratégia de movimento.
Até agora construímos a orquestra, onde todos componentes aprenderam a sua parte. Agora estamos prontos para ensaiar a orquestra inteira. Harmonia, padronização e estabilização são componentes chave para a fase final nesse modelo.

O aluno é capaz de neutralizar perturbações e interrupções externas que impedem que a habilidade seja desautomatizada. Para resolver um problema motor de forma consistente sob uma variedade de condições, o aluno precisa experimentar tantas modificações da tarefa quanto possível, uma forma de repetição sem repetição [2].
Vamos adicionar uma luva na mão durante uma maciça tempestade de neve. A tarefa de abrir uma porta se torna diferente. Pense em uma pós reconstrução do LCA, o ligamento está inteiro novamente, mas terá de aprender como funcionar em conjunto com o resto do corpo sob uma enorme variedade de condições.
Concluindo, Bernstein declara em seu livro Dexterity and its Development [2]:
“O ponto é que durante um exercício organizado corretamente, um aluno está repetindo muitas vezes, não os meios para resolver um determinado problema motor, mas o processo de sua solução, a mudança e melhora dos meios (pág. 205)”.
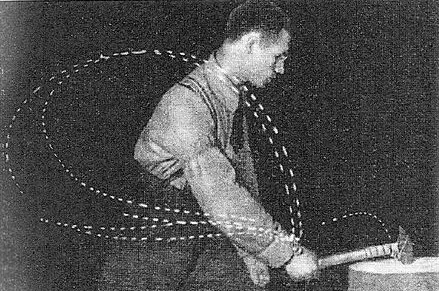
(N.T: Sobre a frase de Bernstein mencionada no início: “Repetição sem repetição” cabem algumas palavras para sabermos sua origem. Na década de 20, Bernstein estava no Instituto Central do Trabalho em Moscou estudando o movimento usado pelos ferreiros para cortar metal usando formão e martelo, através de uma técnica inventada por ele, imagem abaixo.Sua pesquisa mostrou como movimentos repetitivos são compostos de uma série de pequenos desvios de trajetória, ou seja, a trajetória nunca é exatamente igual. E que os melhores ferreiros eram aqueles que mostravam a maior variabilidade nos padrões motores, que, por sua vez, tinham por objetivo acertar continuamente o mesmo ponto do aço em que estavam trabalhando).
Teorias do aprendizado motor
Até aqui discutimos 3 teorias relevantes e proeminentes dos estágios de aprendizagem. Embora compartilhem suas semelhanças e diferenças, a aquisição de habilidades é muito mais profunda do que isso. A breve visão geral acima nos leva à próxima seção que explica duas teorias gerais do controle motor.
A principal questão que os pesquisadores enfrentam é como o corpo (músculos e articulações) se move de maneira independente em um ou mais planos a fim de realizar o movimento desejado (coordenação)?
Na verdade, o que os pesquisadores estão enfrentando atualmente é como essas perspectivas e teorias podem compartilhar o mesmo princípio subjacente de “ruído” ou “variabilidade”, pois pode estar relacionado à motivação e aos fatores de atenção.
(N.T: O que chamam de “ruído” ou variabilidade em muitos casos é o mesmo que tradicionalmente chamamos de “erro”, o movimento errado, o agachamento em que o joelho passa da ponta do pé, por exemplo).
Uma frase comum na literatura do aprendizado e controle motor é “o problema dos graus de liberdade” [2].
Colocado de forma simples, existem muitas maneiras de coordenar nossos músculos e articulações a fim de resolver um problema motor. Voltando ao exemplo da chave, você pode mudar a mão que usa para pegar a chave e abrir a porta, determinar quantos dedos vai usar, o número de outras tarefas que estiver fazendo simultaneamente (como falar ao telefone). Do começo ao fim precisamos resolver o problema dos graus de liberdade, que é, ser capaz de controlar o corpo para produzir o movimento desejado em uma determinada situação.
As teorias a seguir explicam como o sistema nervoso resolve o problema.
Teoria do Esquema de Schmidt: Programa Motor Generalizado
A primeira é uma teoria baseada em programa motor, é uma teoria orientada de forma hierárquica.
Schmidt [7] define programa motor como uma representação abstrata do plano de movimento, armazenada na memória, que contém todos os comandos motores requeridos para levar a cabo a ação pretendida. Ele representa uma classe de ações que podem ser modificadas para produzir vários resultados de resposta.
Por exemplo, um salto vertical é o deslocamento do centro de massa do indivíduo. O que não é diferente de um salto vertical em uma perna, saltar uma cerca ou subir escadas.

Pense em uma biblioteca onde você está procurando William Shakespeare e encontra uma seção de todos os livros relevantes para aquele autor, a despeito do título exato do livro que está procurando.
Existem características subjacentes que não variam independente do que você faça. Essas são características que permanecem as mesmas, independente das mudanças nas condições de medida. Um salto vertical sempre será o deslocamento do centro de massa do indivíduo, enquanto que a seção de livros da biblioteca será toda de William Shakespeare.
Ao mesmo tempo, o aluno precisa adaptar parâmetros para diferentes demandas da tarefa. Cada habilidade motora tem características invariáveis, que são fixas (Ex.: Timing relativo, força relativa. Sequência) que mudam dependendo da situação.
(N.T: A palavra timing, que é bastante usada no português, sempre terá uma relação com o tempo, já que vem da palavra time = tempo. Também pode significar sincronicidade, que vem de sincronia, a relação temporal de uma série de eventos coordenados).
Um programa motor é uma série de comandos pré-estruturados que são construídos nos níveis corticais superiores e então transmitidos aos centros inferiores dentro da hierarquia responsável por executar o movimento.
Em outras palavras, você desenvolveu um programa motor que não precisa mais de pensamento consciente. Por exemplo: Quando caminha, está pensando em dorsiflexão e flexão plantar do tornozelo?

Isso pode confundir um pouco o leitor, porque há pouco referenciei os níveis de Bernstein. Observe que a teoria de Bernstein não é uma hierarquia, mas uma contínua interação motora e perceptiva.
Schmidt [7] mais tarde referencia o termo “esquema” como uma série de regras que guiam a tomada de decisão a respeito do objetivo da habilidade. Por exemplo: Um atacante no voleibol pode atacar em qualquer lugar da quadra adversária, mas o passe que ele recebe dita principalmente para onde a bola pode ir.

Para resumir o que é chamado de “Teoria generalizada de programa motor”, 4 informações são importantes [5]:
- As condições ambientais quando o movimento inicia.
- Os requerimentos específicos do movimento (Ex.: Velocidade, força, etc.).
- A consequência sensorial do movimento (Ex.: Como o indivíduo sente).
- O resultado do movimento (Isto é, o resultado real e o resultado pretendido).
Tudo isso ocorre através de 2 mecanismos:
- “Esquema de lembrança/recordação (N.T: Recall schema)” essencialmente significa organizar o programa motor para que ele inicie e controle o movimento.
- “Esquema de reconhecimento (N.T: Recognition schema)” avalia e compara o resultado usando informação sensorial.
Em outras palavras, o primeiro atualiza o sistema e o segundo o revisa [5].
Concluindo, o programa motor generalizado representa uma classe de ações ou padrões de movimento que podem ser modificados para produzir várias resultados. Características invariantes são relativamente fixas, enquanto parâmetros são características flexíveis que definem como executar um programa motor generalizado, facilmente modificáveis de um indivíduo para outro.
Perspectiva dos Sistemas Dinâmicos
A segunda teoria do controle motor é a “Perspectiva dos Sistemas Dinâmicos”. Essa é uma perspectiva não linear onde o padrão de movimento emerge em função das restrições do ambiente, organismo e da tarefa. Toda a informação necessária para que o movimento seja bem sucedido é encontrada no ambiente e pode ser observada pelo aluno.
Não existe um controle hierárquico aqui em virtude da cooperação dos pequenos sistemas (muscular, esquelético, neurológico e biológico), não existe comandante, significando que o movimento se auto-organiza.
(N.T: O cérebro não é o comandante e revisor de cada padrão de movimento que surge em resposta a um desafio que o ambiente propõe. Isso é diretamente contrário à Teoria do Esquema de Schmidt, onde todo padrão de movimento é executado por meio de programas motores. A participação onipresente do cérebro no comando e controle de todos os movimentos apresenta 2 problemas:
1 – Custo energético: O cérebro consome muita energia.
2 – Tempo de delay/atraso: Toda essa série de comandos motores se dá através da rede de distribuição de impulsos elétricos, o que leva tempo para ocorrer. No esporte de alta intensidade, sobretudo em ambientes imprevisíveis de quadra e campo muitas vezes o atleta não tem o luxo de dispor do tempo necessário para que esses impulsos viajem pra lá e pra cá.
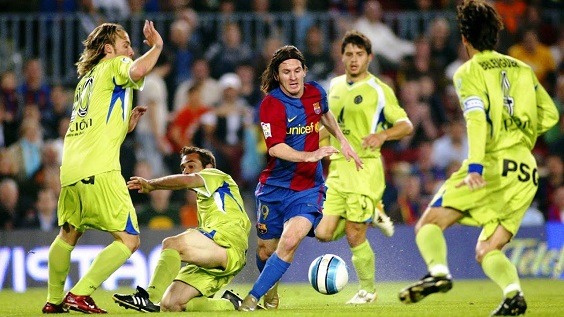
Exemplo: Um jogador de futebol cercado por adversários durante uma partida não tem tempo para pensar em todas as alternativas das quais dispõe. A perspectiva baseada em Sistemas Complexos ou Sistemas Dinâmicos, propõe outra forma de lidar com essa questão, porém a explicação está além do escopo desse texto).
As restrições limitam as capacidades de movimento do indivíduo [6].
Existem 3 categorias de restrição:
- Organismo: Estrutural/funcional, inclui a forma do corpo, peso, altura, cognição, etc.
- Ambiente: Inclui a temperatura, iluminação, vento, presença de público em um evento esportivo, etc.
- Tarefa: Regras de um jogo, objetivo da tarefa, implementos que serão manipulados, etc.

O resultado da interação dessas restrições é o nosso estado estável (figura acima). O aluno prefere estar no estado estável, o que também é conhecido como “Estado Atrator” dentro da literatura de controle motor que segue esse modelo e é o que preferimos.
Quando ocorre uma mudança nas restrições, a estabilidade de nosso sistema está em risco. O padrão de movimento é forçado a se reorganizar e uma nova técnica irá começar a assumir, fazendo com que a estabilidade seja readquirida.
Pense em estar sobre uma esteira quando a velocidade é aumentada e você não consegue mais caminhar e é forçado a correr.

Para os pesquisadores em prevenção de lesões, o período de tempo da perturbação até a estabilidade é onde a pesquisa precisa ser direcionada. Mais, parâmetros de controle como: Direção, força, velocidade e informação perceptiva são variáveis que movem o aluno em um novo estado atrator.
(N.T: Dentro da literatura dos sistemas complexos, parâmetro de controle é uma variável que quando modificada muda o comportamento de todo o sistema. No exemplo acima, a velocidade é um parâmetro de controle, quando foi aumentada na esteira, modificou o sistema inteiro, o indivíduo passa da caminhada para a corrida de forma ABRUPTA. A ênfase na palavra “abrupta” se deve ao fato de que essa mudança nunca será gradual, não existe um estado intermediário entre caminhar e correr, ou se corre ou se caminha).
Essa perspectiva enfatiza a interação entre o aluno e o ambiente físico. Portanto, coordenação é vista como uma interação entre restrições, estabilidade e a habilidade requisitada e não como uma predefinição de comandos como visto no programa motor generalizado.
Embora não esteja no escopo dessa introdução, existem fatores psicológicos que ajudam a identificar parâmetros do contexto para os quais uma ação pode ser selecionada. Esses incluem: Affordances, atenção, motivação, cognição, experiências, além de outros.
(N.T: Affordance pode ser traduzida como “oportunidade de movimento”. Esse é um termo cunhado por James J. Gibson, psicólogo americano que é o pai da Teoria Ecológica da Percepção-Ação. Em resumo, affordance é uma relação do que o ambiente oferece com o nível de habilidade do indivíduo. Um exemplo é uma piscina: A piscina oferece a oportunidade de movimento/affordance de nadar, mas apenas para os que possuem a habilidade para tal, aos que não sabem nadar não existe oportunidade de movimento ali).
Problemas com a aquisição de uma habilidade
Sendo que o estudo da aquisição de uma habilidade ainda está em sua infância, os pesquisadores ainda precisam descobrir quais as melhores práticas para aumentar o processo de aprendizado motor em habilidades motoras complexas aplicadas fora do ambiente de laboratório.
Abordagens tradicionais têm falhado em capturar o aprendizado motor como reflexo da atividade de exploração. Em outras palavras, ainda estamos na era de reproduzir representações estáticas de um movimento, condicionados a seguir demonstrações sobrecarregadas de instrução e, portanto, parece que estamos perdendo de vista a complexidade do movimento como produto do executante e seu ambiente.
(N.T: Pensemos na nossa própria atuação em academia, campo ou quadra. Nossa tendência é fazer demonstrações do movimento e bombardear o executante com instruções verbais. Pensar no movimento “certo” estereotipado e rejeitar qualquer coisa que se desvie do que temos como padrão como sendo “erro”).
Isso é particularmente aparente nos métodos de treinamento de jovens usados nos países desenvolvidos, usando exercícios não exploratórios repetitivos.
(N.T: No texto o autor cita como exemplo “line drills”, embora o termo tenha outras definições, a mais comum são exercícios na quadra ou campo que usam a linha no chão como referência visual, daí vem o termo “line”, linha em português. O vídeo abaixo mostra alguns exemplos).
É imperativo que avancemos no diálogo, talvez na direção da abordagem Ecológica de Percepção e Ação (Está dentro de muitas linhas da Teoria dos Sistemas Dinâmicos).
(N.T: A abordagem Ecológica de Percepção e Ação foi proposta por James J. Gibson, como já mencionado, na década de 60. A abordagem de Gibson estabelece que nós percebemos o ambiente a nossa volta de forma direta, sem a necessidade de uma representação mental, de novo, nada de cérebro aqui. Percepção e Ação são duas entidades inseparáveis, percebemos para agir e agimos para perceber).
Outro problema parece ser uma abordagem coletiva para entender a semelhança subjacente entre todas as teorias e perspectivas do aprendizado e controle motor. Pode ser que “ruído” e “variabilidade”, como função da motivação e atenção sirvam como resposta. Claro que isso é uma intuição e precisa ser melhor investigado, especialmente em habilidades abertas.
(N.T: Habilidades abertas, tradução para open skills. Esportes coletivos de campo e quadra são exemplos de habilidades abertas, onde o ambiente é imprevisível. Habilidades fechadas, closed skills em inglês, são exemplificadas pelos esportes de pista, como as corridas ou os lançamentos/arremessos no atletismo onde o ambiente é muito mais previsível).
Pesquisas futuras
Embora muitas avenidas de pesquisa ainda precisem ser exploradas, a chamada teoria “OPTIMAL” é um excelente ponto de partida, já que ela abrange a natureza interdisciplinar da aquisição de habilidades.
(N.T: A palavra OPTIMAL, que significa ótimo(a), é uma sigla nesse caso → Optimize Performance Through Intrinsic Motivation and Attention for Learning / Otimizar o Desempenho através da Motivação Intrínseca e Atenção para o Aprendizado).
Outra área de importância é como trazer a pesquisa do laboratório para o campo, particularmente para os esportes. Algumas áreas chave de pesquisa incluem:
- Quantificar o sucesso na prática.
- Preencher a lacuna entre a biomecânica e o aprendizado e controle motor no treinamento.
- Feedback (autonomia, foco de atenção externo/interno, positivo/negativo).
- Quando? Onde? Como?
- Efeito da interferência contextual na aquisição de habilidade através do contínuo
Iniciante ⇒ Especialista. - Aprendizado representativo na prática.
- Treinamento para melhorar a tomada de decisões no esporte.
Conclusão
Concluindo, a aquisição de habilidade (N.T: Skill acquisition) preenche a lacuna entre a ciência do treinamento (N.T: Treinamento na tradução de coaching), reabilitação, preparação física e recuperação. É a base da ciência desportiva que todos profissionais envolvidos deveriam compreender. O mais importante, é uma abordagem interdisciplinar para o entendimento da relação cérebro-comportamento.
Referências
- Araújo, D., Davids, K. What exactly is acquired during skill acquisition? Journal of Consciousness Studies, 2011.
- Bernstein, N. A. (M. L. Latash & M. T. Turvey, Eds.). Resources for ecological psychology: Dexterity and its development. Hillsdale, NJ, US: Lawrence Erlbaum Associates, Inc. 1996.
- Fitts, P. M., Posner, M. I. Human Performance. Brooks/Cole Pub. Co; Belmont, CA, 1967.
- Gentile, A. M. A working model of skill acquisition with application to teaching. Quest, 1972.
- Magill, R. A., Anderson, D. I. Motor learning and control: Concepts and applications (Vol. 11). New York: McGraw-Hill, 2007.
- Newell, K. M. Motor skill acquisition. Annual review of psychology, 1991.
- Schmidt, R. A. A schema theory of discrete motor skill learning. Psychological review, 1975.
- Wulf, G., Lewthwaite, R. Optimizing performance through intrinsic motivation and attention for learning: The OPTIMAL theory of motor learning. Psychonomic Bulletin & Review, 2016.
- Zipp, G. P., Gentile, A. M. Practice schedule and the learning of motor skills in children and adults: teaching implications. Journal of college Teaching and Learning, 2010.
Artigo original: Skill Acquisition